

噪声基础#
1. 使用密度矩阵#
1.1 密度矩阵的必要性#
在量子力学中,纯态可以用态矢量 \(\ket{\psi}\) 表示。然而,在实际的量子系统中,常常需要处理混合态。混合态描述了一个系统处于多个纯态的概率混合。这种情况下,态矢量的描述方式不再适用,需要引入密度矩阵的概念。(详见密度矩阵的定义)
1.2 包含外部信息#
密度矩阵能够包含系统与外部环境的关联信息。对于一个混合态,其密度矩阵定义为:
\[
\rho = \sum_i p_i \ket{\psi_i}\bra{\psi_i}
\]
其中,\(p_i\) 是系统处于纯态 \(\ket{\psi_i}\) 的概率,满足 \(\sum_i p_i = 1\)。密度矩阵不仅能够描述统计混合,还能够表示部分可观测系统的状态,是研究开放量子系统的基本工具。
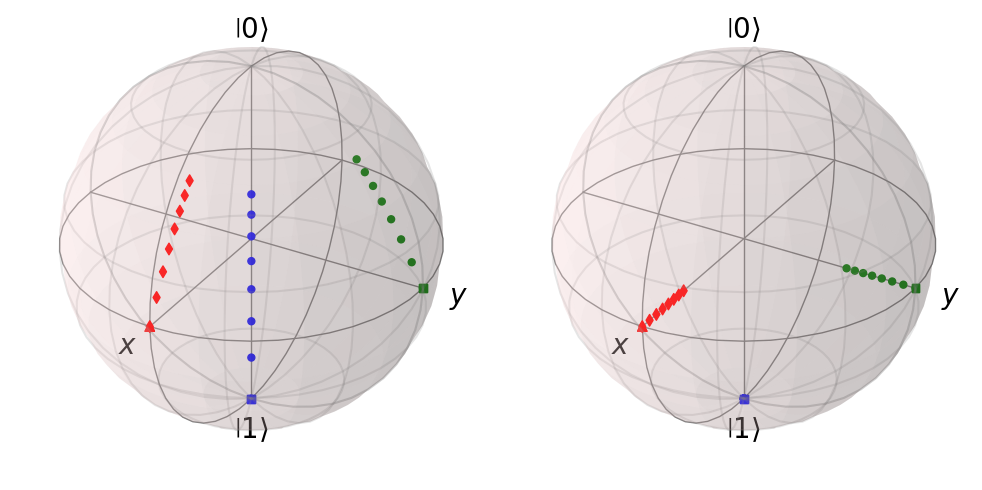
图 6.1 单量子比特的密度矩阵所表示的态,不仅可以在 Bloch 球的表面,也可以在中间。即迹小于1.#
2. 量子噪声的特性与假设#
在研究量子噪声和错误缓解方法之前,需要明确一些关于噪声的基本假设。这些假设有助于建立可处理的噪声模型,便于分析和设计错误缓解策略。
2.1 噪声的基本假设#
时间不变性(Time-independent):噪声的性质和发生概率在时间上是稳定的,即噪声模型不随时间变化。
马尔可夫性(Markovianity):噪声过程仅与当前状态有关,与系统的历史演化无关。
局域性(Locality):噪声通常是局域的,只影响单个量子比特或相邻比特之间的相互作用。尤其是,噪声只发生在当前操作所在的量子比特上。
低误差率(Low Error Rate):噪声对量子态的影响较小,可以视为对理想演化的微扰。
这些假设为构建噪声模型和设计错误缓解方法提供了基础。在实际系统中,这些假设可能并不完全成立,但仍然具有指导意义。
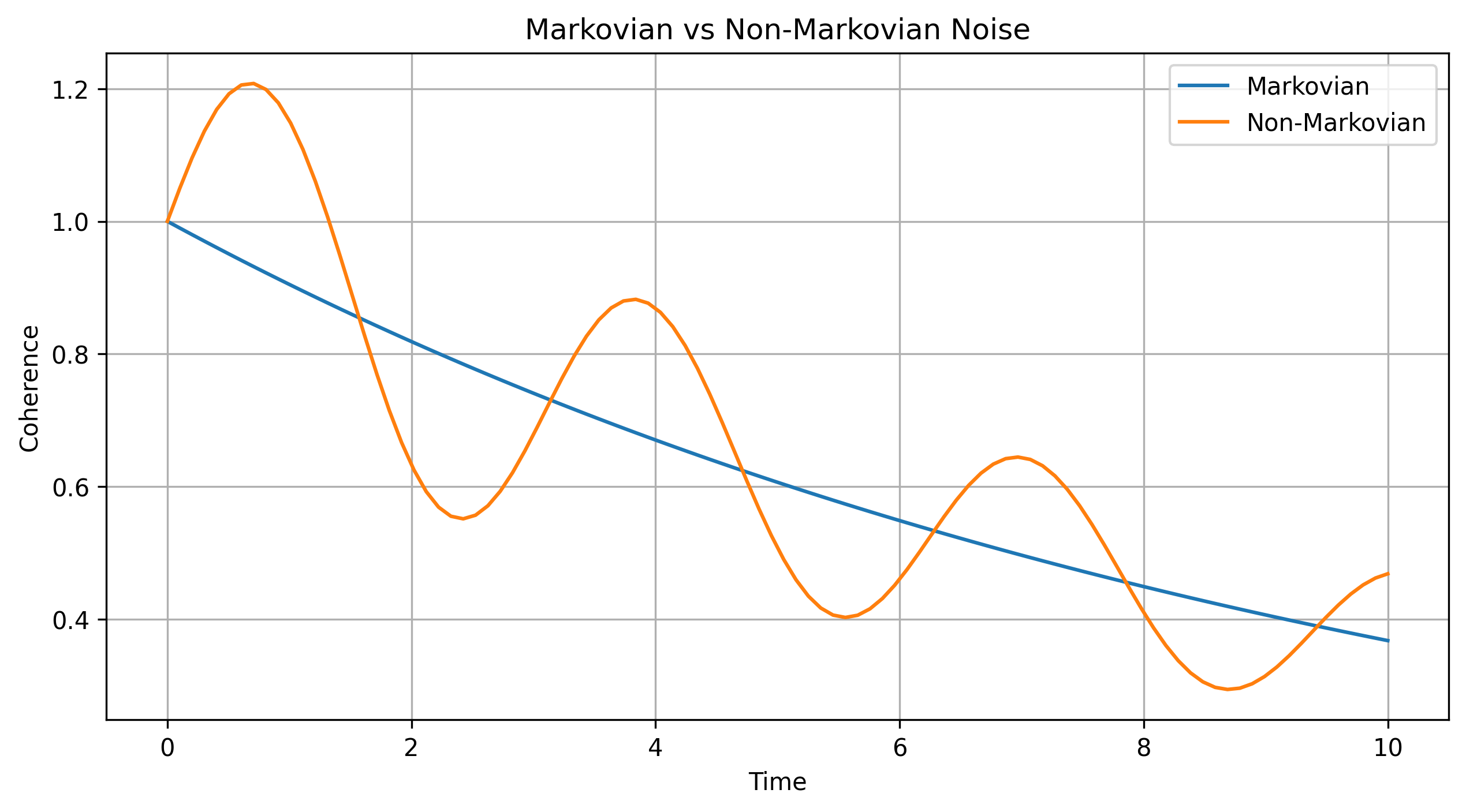
图 6.2 马尔可夫噪声,当前的状态会受到历史信息的影响。#