态的表示
对于一个二能级态,我们通常标注它为\(\ket{0}\)或\(\ket{1}\)。这里,我们使用一个叫"Bloch"球的单位球体来刻画处于这两个态之间的所有叠加态。
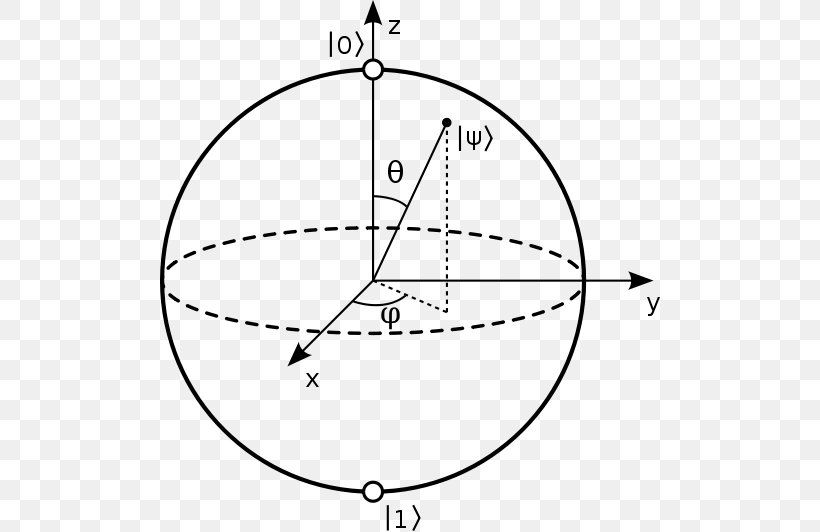
图 2.2 布洛赫球示意图
如图,这是一个典型的Bloch球体示意图,z轴正轴是\(\ket{0}\),负轴是\(\ket{1}\)。对于任何一个态\(\{\alpha\ket{0}+\beta\ket{1} | \alpha,\beta\in \mathbb{C}\}\)来说,都可以用这球体上的一个点来描述。
同样的,这球面上的态可以使用矩阵的表示:
备注
一个值得一提的事情是,\(\ket{0}\)和\(\ket{1}\)的矩阵表达形式是量子力学里的本征态自然得到的结果,并非什么特殊的约定。当使用一个算符\(A\)的所有本征矢量\(\{a\}\)作为基时,这些本征矢量自身如果满足归一性就应当表达为\(\begin{pmatrix} 1 & 0 \end{pmatrix}^T\)等等。
\[\begin{split}
\ket{0} = \begin{pmatrix} 1 \\ 0 \end{pmatrix}
\end{split}\]
\[\begin{split}
\ket{1} = \begin{pmatrix} 0 \\ 1 \end{pmatrix}
\end{split}\]
\[\begin{split}
\ket{s} = \alpha\ket{0}+\beta\ket{1} = \begin{pmatrix} \alpha \\ \beta \end{pmatrix}
\end{split}\]
既然我们有此Bloch球体,那就可以考虑在不同的极点的一些特殊态。我们假定在这球体上的三个方向的基矢量为\(\mathbf{i}, \mathbf{j}, \mathbf{k}\),那么在这球体上的任何一个点就有了两种表示方式:
使用\(\alpha\ket{0}+\beta\ket{1}\)的组合来表示。这里\(\alpha\)和\(\beta\)是复数且平方和等于1.
使用\(a\mathbf{i}+b\mathbf{j}+c\mathbf{k}\)来表示。这里\(a\),\(b\),\(c\)是实数且平方和等于1.
第一种是使用态矢量来刻画的表示,第二种是几何的表示。
那么,对于在x轴极点方向的态就是:
\[\begin{split}
\ket{+} = \frac{1}{\sqrt{2}}(\ket{0}+\ket{1}) = \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ 1 \end{pmatrix}
\end{split}\]
\[
1\mathbf{i}
\]
在y轴极点方向的态就是:
\[\begin{split}
\ket{i} = \frac{1}{\sqrt{2}}(\ket{0}+i\ket{1}) = \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ i \end{pmatrix}
\end{split}\]
\[
1\mathbf{j}
\]
小心
在态矢量的刻画中,由于态矢量是仅由\(\ket{0}\)和\(\ket{1}\)定义的空间中的矢量,所以只有\(\braket{0|1}=0\), \(\braket{+|-}=0\), \(\braket{i|-i}=0\)。而不能有\(\braket{0|+}=0\)。
但是在几何的表示中,显然是x, y, z三个轴彼此之间正交。
要千万小心这两种不同的正交定义。
算符的表示
Pauli算符
显然, 这三组不同的极点都能各自完整的表述这个自旋的空间。对于三个不同的极点的态,我们希望能找到它们的本征算符。
比如对于\(\ket{0}\)和\(\ket{1}\),我们希望有\(\sigma_z\),使得\(\sigma_z\ket{0}=\ket{0}\),而\(\sigma_z\ket{1}=-\ket{1}\)。一般来说,对一族本征态,可以构造出很多不同的本征算符,对应不同的本征值,这无非是“谱分解”的本征值不同而已。这里之所以强行选择\(+1\)作为\(\ket{0}\)的本征值而\(-1\)作为\(\ket{1}\)的本征值,是为了和几何定义相对应。
如此一来就有
\[
\braket{\sigma_z}_{\ket{0}}=1
\]
和
\[
\braket{\sigma_z}_{\ket{1}}=-1
\]
并且有
\[
\braket{\mathbf{k}\sigma_z}_{\ket{0}}=1\mathbf{k}
\]
\[
\braket{\mathbf{k}\sigma_z}_{\ket{1}}=-1\mathbf{k}
\]
显然可以构造出它的矩阵表示
\[\begin{split}
\begin{split}
\sigma_z &= 1 \ket{0}\bra{0} + ( -1 ) \ket{1}\bra{1} \\
&= 1 \begin{pmatrix} 1 \\ 0 \end{pmatrix}\begin{pmatrix} 1 & 0 \end{pmatrix} + ( -1 ) \begin{pmatrix} 0 \\ 1 \end{pmatrix}\begin{pmatrix} 0 & 1 \end{pmatrix} \\
&= \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix}
\end{split}
\end{split}\]
同理,有\(\sigma_x\)和\(\sigma_y\),它们的矩阵表示是:
\[\begin{split}
\begin{split}
\sigma_x &= 1 \ket{+}\bra{+} + ( -1 ) \ket{-}\bra{-} \\
&= 1 * \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ 1 \end{pmatrix}\begin{pmatrix} 1 & 1 \end{pmatrix} + ( -1 ) * \frac{1}{\sqrt{2}} \begin{pmatrix} 1 \\ -1 \end{pmatrix}\begin{pmatrix} 1 & -1 \end{pmatrix} \\
&= \begin{pmatrix} 0 & 1 \\ 1 & 0 \end{pmatrix}
\end{split}
\end{split}\]
以下注意\(\bra{s}\)是\(\ket{s}\)的转置共轭。
\[\begin{split}
\begin{split}
\sigma_y &= 1 \ket{i}\bra{i} + ( -1 ) \ket{-i}\bra{-i} \\
&= 1 * \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ i \end{pmatrix}\begin{pmatrix} 1 & -i \end{pmatrix} + ( -1 ) * \frac{1}{\sqrt{2}} \begin{pmatrix} 1 \\ -i \end{pmatrix}\begin{pmatrix} 1 & i \end{pmatrix} \\
&= \begin{pmatrix} 0 & -i \\ i & 0 \end{pmatrix}
\end{split}
\end{split}\]
这三个矩阵被称为Pauli矩阵,或者算符被称为Pauli算符,在量子计算中广为使用。
可以发现
\[
\sigma_x^2 = \sigma_y^2 = \sigma_z^2 = \mathbb{1}
\]
矢量算符
定义以下算符(其实这种定义在之前已经初现端倪了)
\[
\vec{\sigma} = \mathbf{i}\sigma_x + \mathbf{j}\sigma_y + \mathbf{k}\sigma_z
\]
显然可以看出这是之前定义的态表示和矢量表示的一种映射。这个算符对态(矩阵)表示的期望值,就是几何表示中的三维实矢量。
\[
\braket{\vec{\sigma}}_{\ket{s}} = \vec{s}
\]
这里\(\vec{s}\)是在几何表示中和态表示对应的三维实矢量。
转动算符
倘若我们要让一个任意矢量绕Z轴旋转,可以发现这个操作就是:
\[
R_z(\theta) = e^{-i\theta \sigma_z/2}
\]
因为对任意矩阵的函数都有谱分解,
\[
f(A) = \sum_a f(a) \ket{a}\bra{a}
\]
那么
\[\begin{split}
\begin{split}
e^{-i\theta\sigma_z/2}(\alpha\ket{0}+\beta\ket{1}) &= (e^{-i\theta*1/2} \ket{0}\bra{0} + e^{-i\theta*(-1)/2} \ket{1}\bra{1}) (\alpha\ket{0}+\beta\ket{1}) \\
&= \alpha e^{-i\theta/2} \ket{0} + \beta e^{i\theta/2} \ket{1} \\
&= \alpha \ket{0} + \beta e^{i\theta} \ket{1}
\end{split}
\end{split}\]
最后一步增加了一个全局相位。最后得到的态正好是初态绕Z轴旋转了顺时针\(\theta\)的角度。
考虑到x, y, z三个轴的对称性,肯定会有一个酉算符能将整个坐标体系的z轴变换到x轴上去
\[
U^\dagger \sigma_z U = \sigma_x
\]
而对于旋转算符,只需要将它展开成级数形式,再往中间插入\(1=U U^\dagger\)就能得到:
\[\begin{split}
\begin{split}
U^\dagger e^{-i\theta\sigma_z/2} U
&= U^\dagger \sum_n c_n \sigma_z^n U \\
&= \sum_n c_n U^\dagger \sigma_z^n U \\
&= \sum_n c_n U^\dagger\sigma_z U\cdots U^\dagger\sigma_z U \\
&= \sum_n c_n \sigma_x^n \\
&= e^{-i\theta\sigma_x/2}
\end{split}
\end{split}\]
这个式子说明先把坐标轴从x转到z,再绕z旋转,再从z转到x,其实就等同于\(e^{-i\theta\sigma_x/2}\)。当然,也可以从\(\sigma_x\)的谱分解来计算。此处不做更多的叙述。
关于绕y轴的旋转,显然是
\[
e^{-i\theta\sigma_y/2}
\]
关于绕三维空间的任意一个轴的旋转,因为可以分解为依次绕三个轴的旋转,所以为:
\[
R_\hat{n}(\theta) = e^{-i\theta\hat{n}\vec{\sigma}/2}
\]
它们的矩阵形式可以用谱分解很好的计算出来。

